Voron Switchwire - Einsy Rambo Wiring
Initial Removal of Jumpers
- The Einsy Rambo will arrive without any jumpers being set.
Initial Preparation - Set Jumpers
- All Jumpers should be removed from the Einsy Rambo board.
- If you want to open the above picture, in a new tab of your web browser, then click here
MCU
-
- Plug in stepper motors for X in positions X (motor connector)
-
- Plug in stepper motors for Y in positions Y (motor connector)
-
- Plug in stepper motors for Z in positions Z (motor connector)
-
- Plug in stepper motors for E in positions E0 (motor connector)
-
- Plug Hot End thermistor to thermistor T0 (PF0)
-
- Plug Hot End heater in to extruder heater HEAT-0 (PE5)
-
- Plug Hot End Fan in to FAN-1 (PH5)
-
- Plug Part Cooling Fan in to FAN-2 (PH3)
-
- Plug Bed Thermistor in to thermistor T2 (PF2)
-
- Connect Bed Heater to Bed Output (PG5)
-
- Connect X end stop to X-MIN (PB6)
-
- Y Endstop is not used.
-
- Connect inductive probe to Probe (PB4), on pins +, -, and ‘s’ on the drawing.
-
- Note: the inductive probe, Pin 1 (T) is unused.
-
- Wire +V and -V from DC power supply to both Power Input and Bed Power Input.
-
- Connect USB Cable, but do not connect it yet to your Raspberry Pi
MCU Diagram
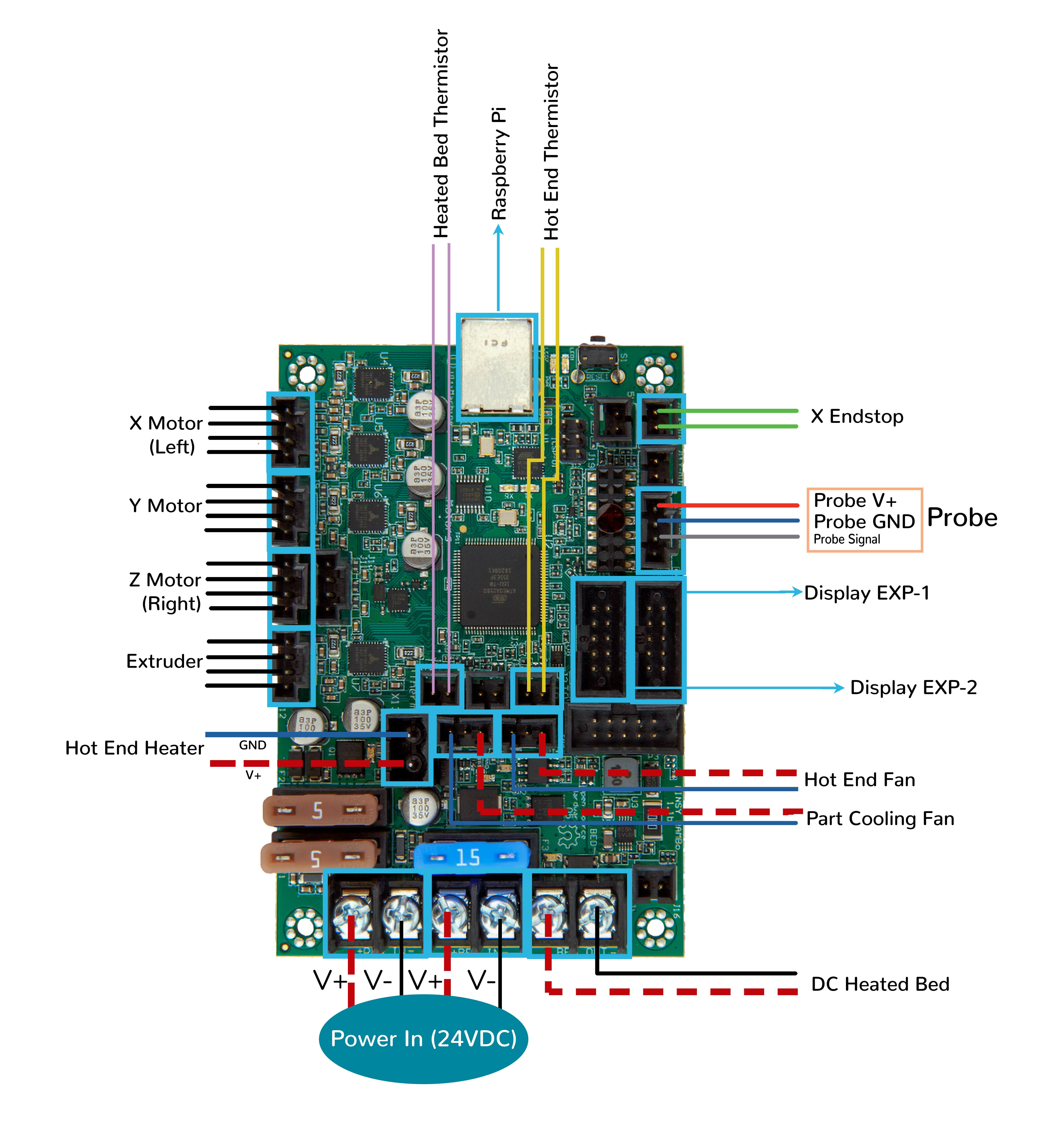
- If you want to open the above diagram, in a new tab of your web browser, and have the ability to zoom and download the diagram in JPG format then click here
Please Ensure the Heat Sinks are Installed Before Use
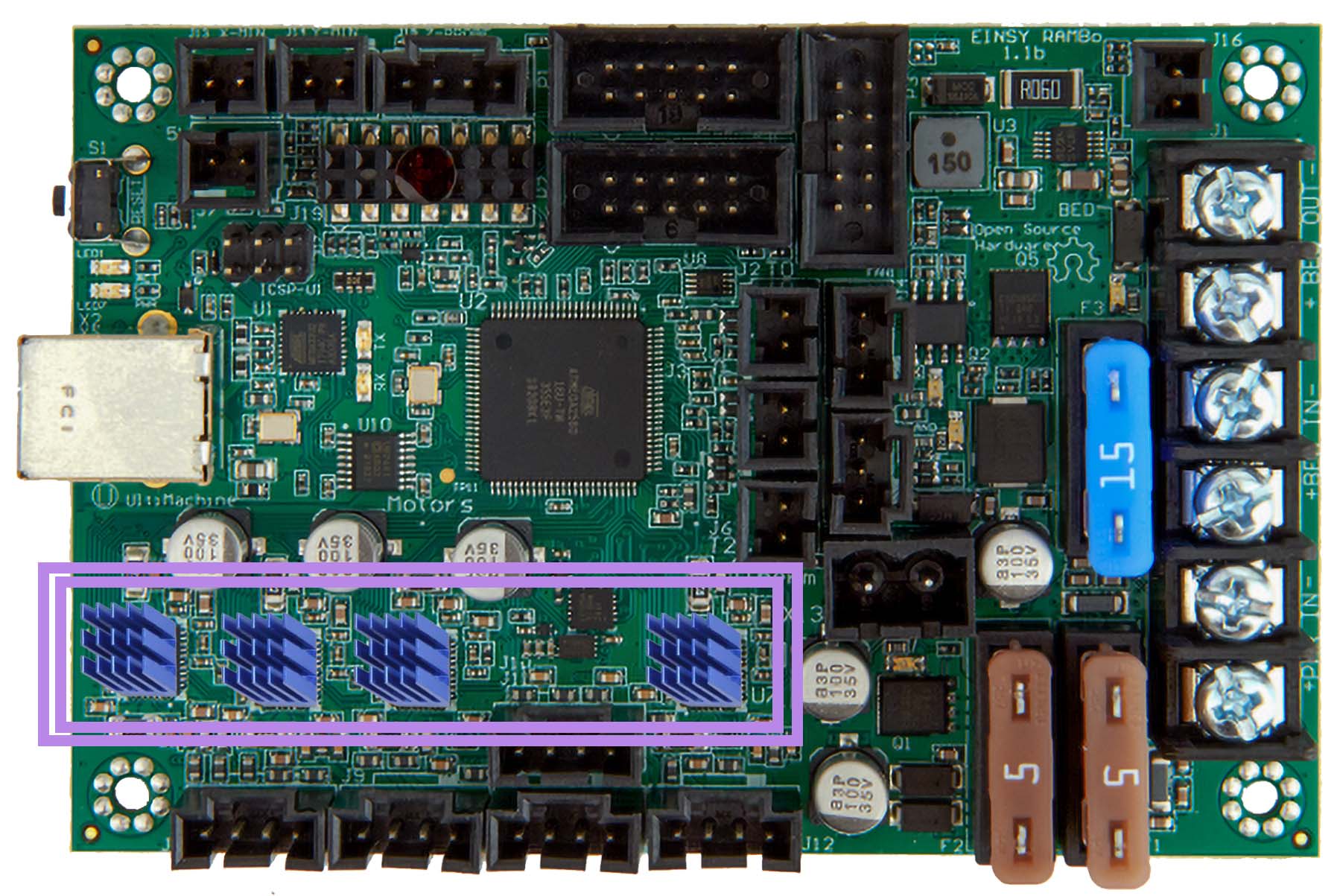
- Note on the Orientation of the Stepper Motor Driver’s Heat Sinks
- Place the heat sinks for the stepper motor drivers so that the orientation of the fins on the heat sinks are parallel to the air flow from the fan(s) once the MCU board is installed in its mounting bracket. Ensure the heat sinks are not touching the solder joints on the MCU board. Please note, that your placement of heat sinks may be different from the orientation shown below.
The Klipper Configuration file for Einsy Rambo Board
The Klipper Configuration file from VoronDesign/Voron-Switchwire GitHub Repo for Einsy Rambo is located here;
Einsy Rambo Pinout
For reference, here is the pinout of the Einsy Rambo
- Note: If you see a conflict between the original pinout and any other source, please refer back to The Einsy Rambo schematic diagram
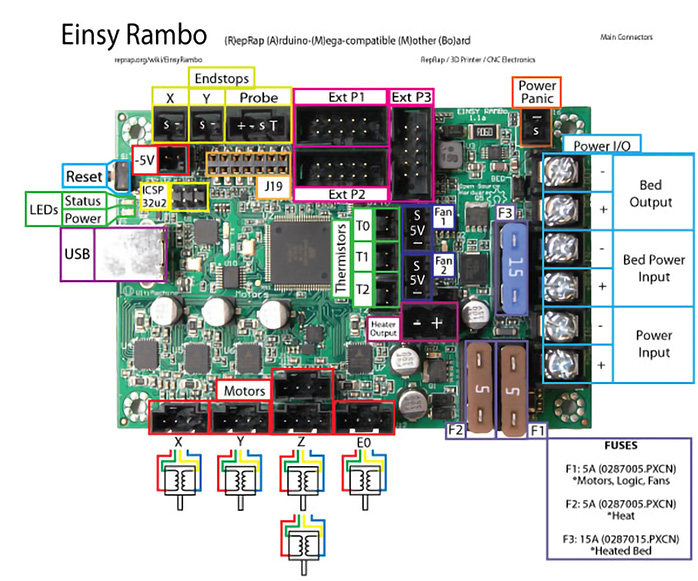
- If you want to open the above diagram, in a new tab of your web browser, and have the ability to zoom and download the diagram in PDF format then click here
RepRap Wiki page for Einsy Rambo
- RepRap’s documentation for the Einsy Rambo board is located here
After I have Wired up the MCU Board, What Comes Next?
-
Once the MCU board is wired up and wire management has been performed, the next step is to install Mainsail/Fluidd or Octoprint, please see The Build ═► Software Installation
-
Once Mainsail/Fluidd or Octoprint has been installed, the next step is to compile and install the Klipper Firmware. The firmware should be compiled for the AVR atmega2560, for Einsy Rambo boards sold by Ultimaker.
- For Einsy Rambo boards sold Prusa, please see the following article
-
Once the MCU board has the Klipper Firmware Installed, the next step is to create/edit the Klipper Config file (skr-pico-v1.0.cfg rename it to printer.cfg) to ensure your Voron build matches your Klipper Config file, please see the file located here; Select “SW Einsy Rambo”;
-
Please use the PIN Diagram, displayed here, as a source of information.
-
Please consult The Build ═► Software Configuration on how to edit the Klipper Config file.
-
-
After creating/editing the Klipper Config file (einsy_config.cfg renamed to printer.cfg), the next step is to check all the motors and the mechanics of the Voron printer, please see The Build ═► Initial Startup Checks